All Categories

















SKU
DAGU-RS0036
Brand
Special Price £66.00 £55.00 Regular Price £68.20
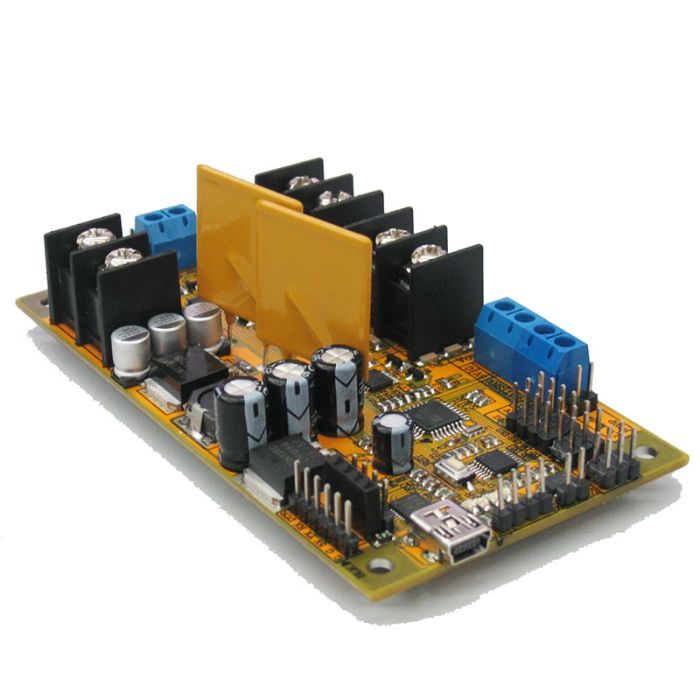
The T’REX controller from DAGU is an Arduino compatible robot controller designed to power and control servos and brushed motors. Supplied sample code allows the controller to connect to a radio control receiver, external controller via I²C or optional bluetooth interface. A sample app allows the controller to be controlled by an Android phone or tablet.
Write Your Own Review
Related Products
Check items to add to the cart or
